Orienting learning by exploiting sociality: an evolutionary robotics simulations
Abstract
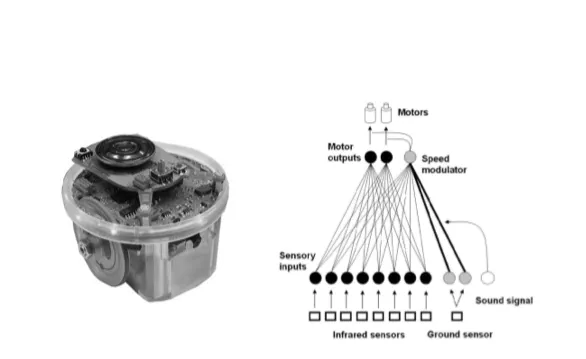
One of the advantages of sociality resides in the opportunity of exploiting the behavior of other individuals of the same group as a reliable source of information. In this paper we present an evolutionary simulation in which a population of 10 mobile robots has to develop a simple behavior consisting in the discrimination of two different foraging areas in the environment. We show that, given a minimal environmental pressure, a combination of learning oriented by social cues and selection at population level can lead to effective results. We further analyse the dynamic of the evolution of sociality, focusing on the fact that the global adaptiveness is a product of the combination of singularly nonadaptive processes and on the presence of a reinforcing positive feedback within populations, that is, the more “social” a population is, the more advantageous it is to exploit social cues in that population.
Type
Publication
Acerbi A., Marocco D. (2009), Orienting learning by exploiting sociality: an evolutionary robotics simulation, in IJCNN 2009 Conference Proceedings, Piscataway, NJ, IEEE Press, pp. 20 – 27