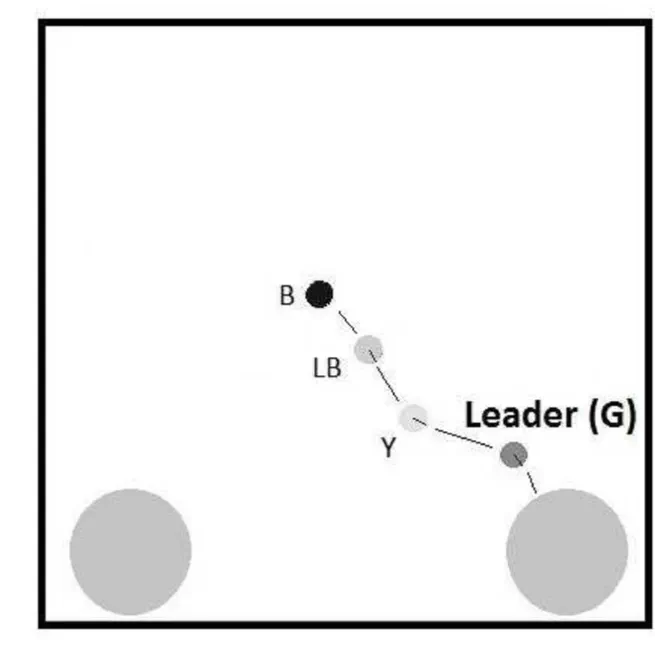
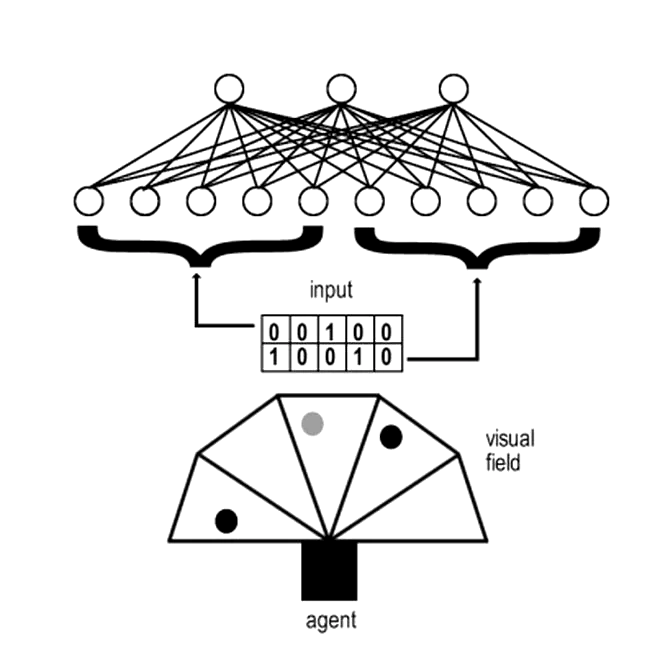
Emergence of Leadership in a Group of Autonomous Robots
Sep 4, 2015
Social learning in embodied agents
I edited, together with Davide Marocco and Paul Vogt, a double special issue of the journal Connection Science on the topic “Social Learning in Embodied Agents”. This is our editorial.
Jun 20, 2008
Cultural transmission between and within generations
Jan 31, 2006